




Ping Pong robot s Pi pogonom
Will Jessop je sistemski administrator pri 37signals in skrbi za severozahodno uporabniško skupino Rubyja v Manchestru. Ben Nuttall je raziskal njegov osebni projekt, ki ga dela v povezavi z Raspberry Pijem. Problem, ki ga rešuje njegov projekt je povezan s ping pong žogicami v nadstropju pisarn 37signals v Chicagu. Rešitev je spletni robot, ki ima pritrjeno kamero in omogoča ljudem, da zberejo žogice v koš. Izvrina različica robota je uporabljala Custard Pi ploščo, Ben pa je Willu predlagal, naj uporabi MotorPiTX krmilnik za motorje, ki ga je razvil Jason Barnett. In res ga je naročil ter se pridružil hekerskem prostoru v Manchestru, kjer je pričel graditi in delati na delih, ki jih je potreboval za robota.
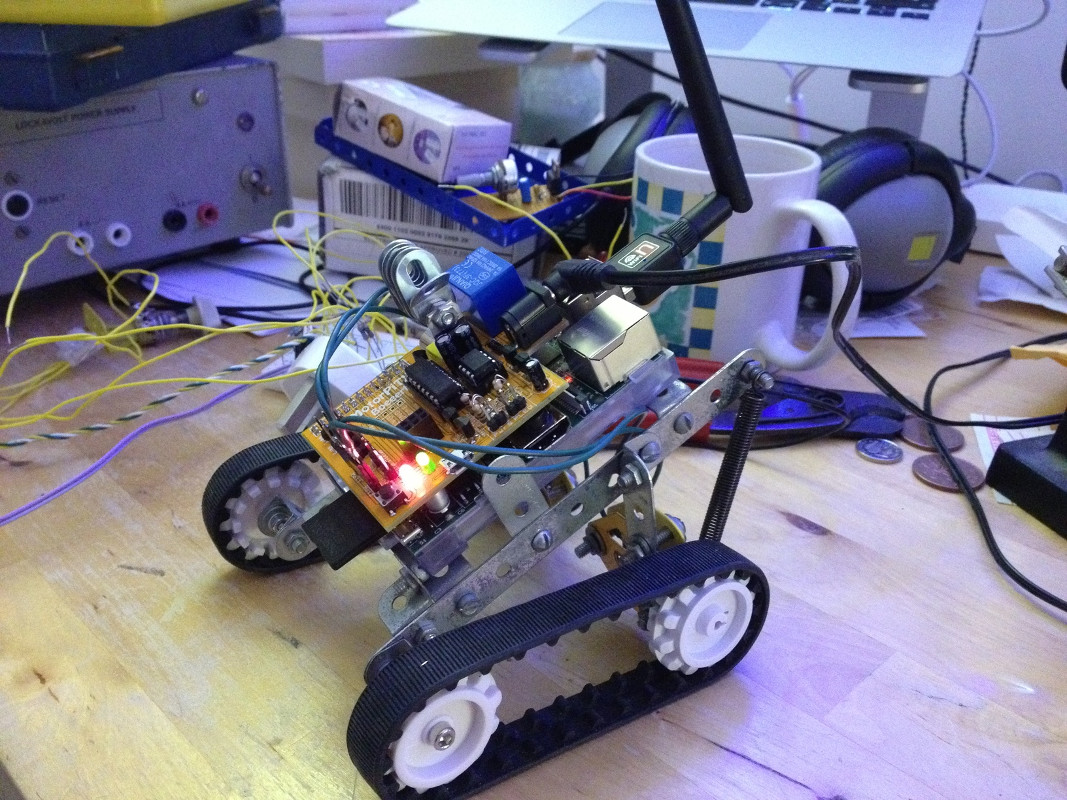
Zgodnja različica robota, ki je že uporabljala MotorPiTX
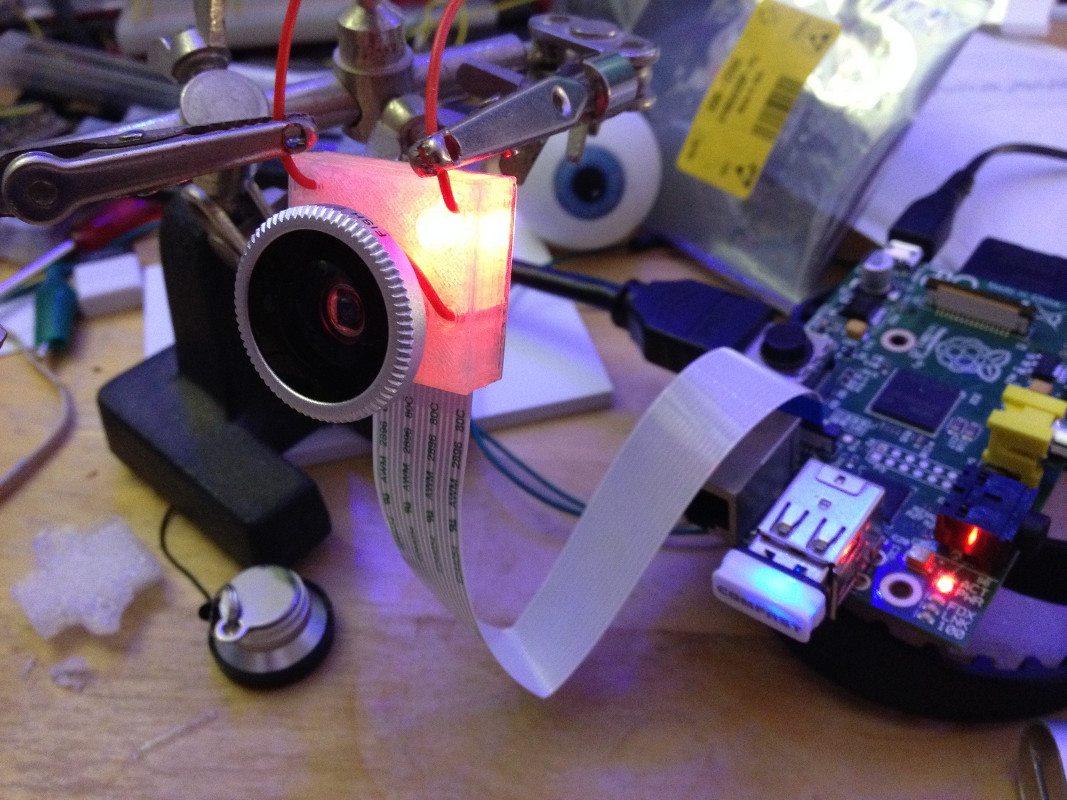
Raspberry Pi kamera modul z lečami “ribjega pogleda” (fish-eye)
Nova plošča za upravljanje motorjev pa je morala biti skladna z izvirnim ohišjem. Will je nadaljeval z izdelovanjem oblike in 3D tiskanih delov za motor, tirnih nosilcev, koša za žogice, nato pa je pritrdil še Pi kamero z lečo, ki omogoča zajem skozi “ribje oko” (fish-eye). Za majhnega robota s kamero je Will iskal še možnosti za napajanje preko baterij, da bi se le-ta okrog prevažal brez dolgih napajalnih kablov. Po meritvi uporabe, ki so jo zahtevale sistemske lastnosti, motorji in video prenos preko brezžičnega omrežja, se je odločil za litijevo baterijo s 5000 mAh in 7.4V. Na ohišje je dodal še dvigalno roko, ki ni odvisna od robota in se jo lahko upravlja.
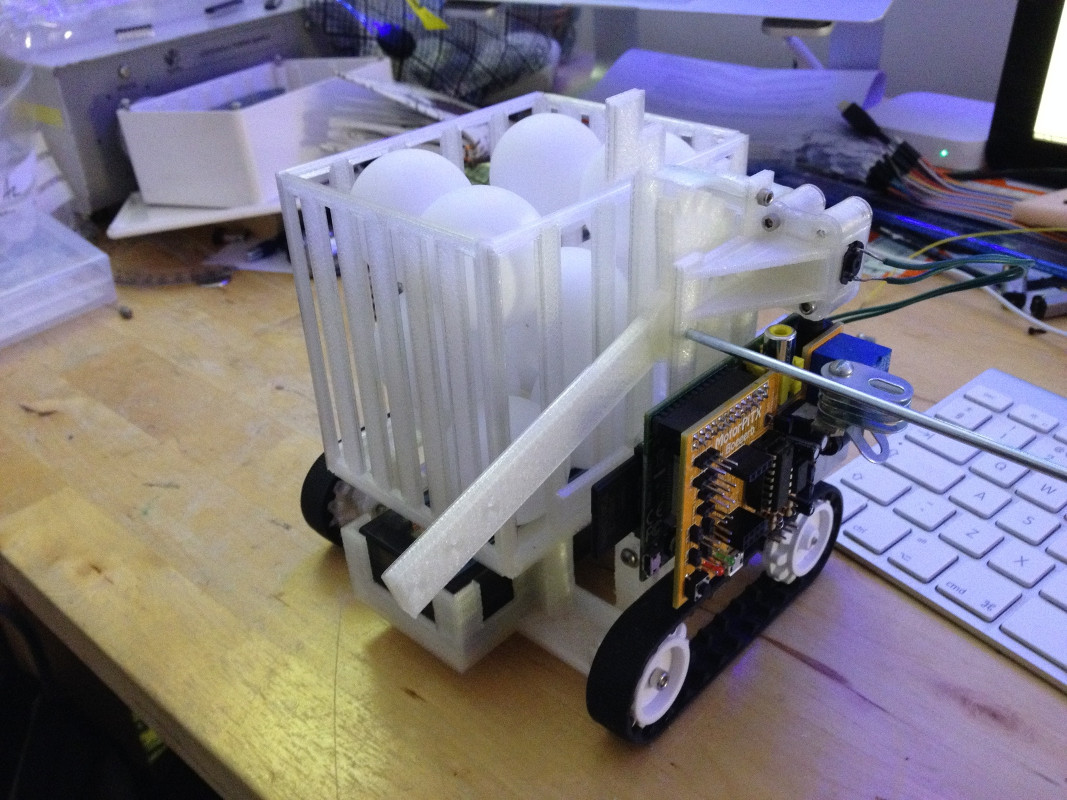
Ohišje Ping Pong robota
Celotna programska oprema na Piju je spisana v programskem jeziku Go, ki ga je Will spoznal za odličnega na Raspberry Piju. Dobro se mu prilega, saj je majhen, učinkovit, statično preveden in ostaja znotraj sistemskih zahtev mini računalnika. Ta je pognan poleg Willove knjižnice za igralno ploščo (napisana v C, na voljo kot Ruby gem), ki se nahaja na prenosnem računalniku. Will je prav tako spisal skripto za nadzor moči, ki lahko Pi pravilno ugasne preko MotorPiTX. Medtem ko se robot prosto vozi naokrog z novimi baterijami, se ga upravlja z Xboxovim krmilnikom, obenem pa prenaša video preko brezžičnega omrežja ter uporablja roko. Dokončan je bil za predstavitev na 16. Manchestrovem Raspberry Jamu. Na ogledu v Manchestrovem hekerskem prostoru med potekom Jama, so bili Eben, Liz in Pete, ki so robota videli med delovanjem. Eben je prišel do krmilnika in pričel pobirati ping pong žogice tako, da je gledal video prenos na prenosnem računalniku.
Will je robota predstavil še v Miamiju na RubyConf, kjer se je z njim igralo veliko število ljubiteljev Rubyja. V spodnjem posnetku si lahko ogledate ping pong robota med pobiranjem žogic, na YouTube pa je na voljo še posnetek iz kamere, nanj pritrjena.
Vsekakor priporočamo branje serije prispevkov na Willovem blogu. Zahvala gre hekerskem prostoru v Manchestru in Jasonu Barnettu, ki je pomagal pri lažjem razvoju projekta. Robot še ni bil nameščen v pisarne 37signals, vendar se bo to zgodilo takrat, ko bo dobil dostop do spleta. Will je prav tako spisal še Go knjižnico za Pimoronijev Piglow. Oglejte si celoten projekt, ter se z njim pozabavajte, nato pa nam dajte vedeti, kaj si o njem mislite.